¡Comience hoy mismo los tutoriales que aparecen a continuación!
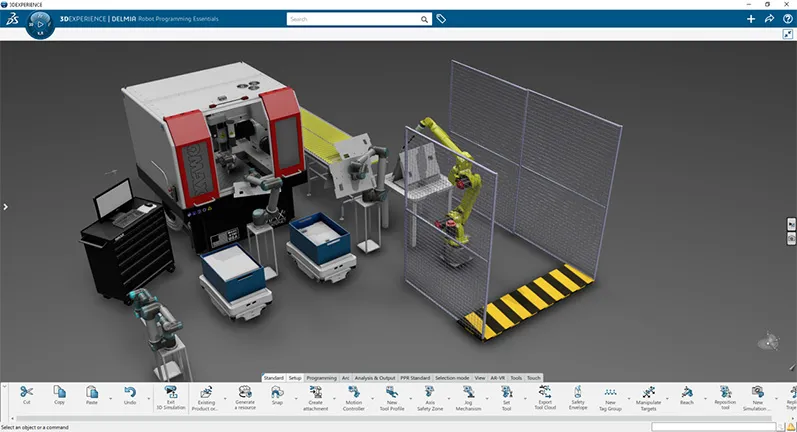
Tony Karew, experto en robótica de SOLIDWORKS®, le enseñará todos los pasos desde el diseño de plantas y células de trabajo, la construcción de dispositivos, los procesos cinemáticos, la programación y simulación de robots, hasta la validación y la programación sin conexión.
Primer paso: Descargar la carpeta zip con archivos modelo para tutoriales.
- Lección 1: Introducción a Robot Programmer
- Lección 2: Creación de un mecanismo cinemático
- Lección 3A: Enseñanza de un robot de manipulación de materiales
- Lección 3B: Enseñanza de un robot de soldadura por arco
- Lección 4: Simulación y validación
- Lección 5: Programación y calibración sin conexión