Commencez les tutoriels ci-dessous dès aujourd'hui !
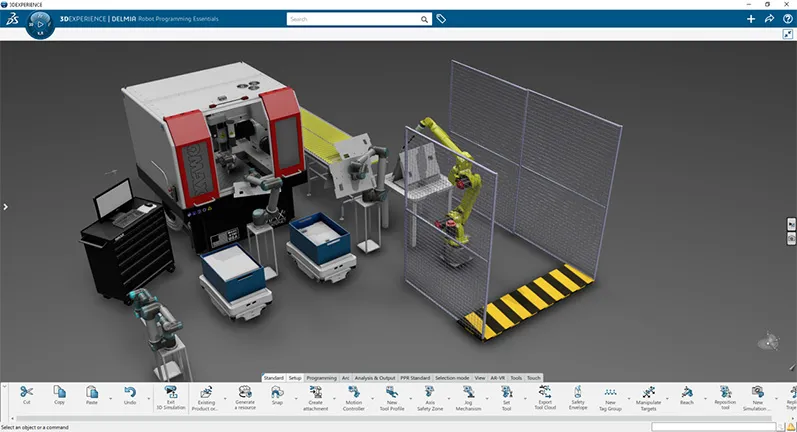
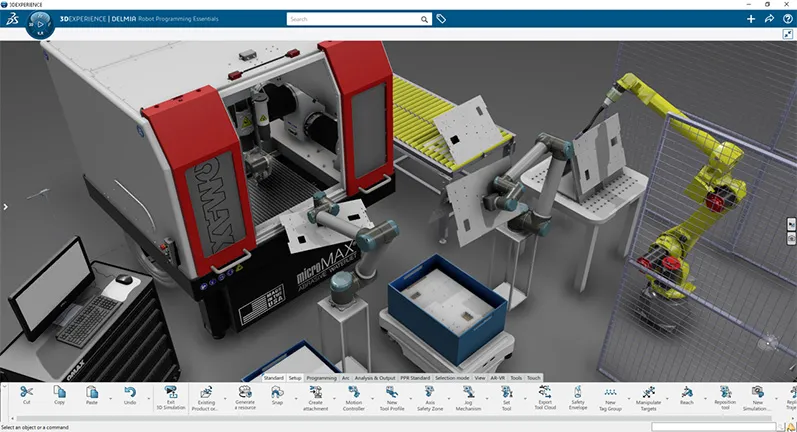
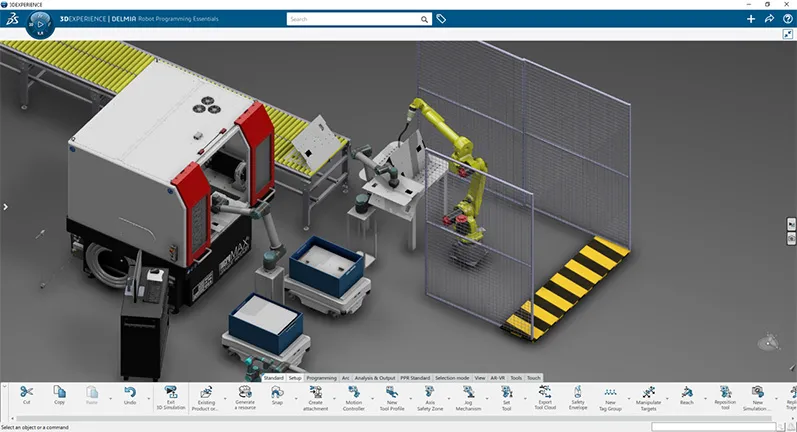
Rejoignez Tony Karew, expert en robotique SOLIDWORKS®, qui vous guidera à travers les leçons pour vous présenter aussi bien la configuration de la cellule de travail et de l'usine que la construction et la cinématique des appareils, l'apprentissage et la simulation robotiques, ainsi que la validation et la programmation hors ligne.
Première étape : téléchargez le dossier zip contenant les fichiers de modèles pour les tutoriels.
- Leçon 1 : Prise en main de Robot Programmer
- Leçon 2 : Construction d'un mécanisme cinématique
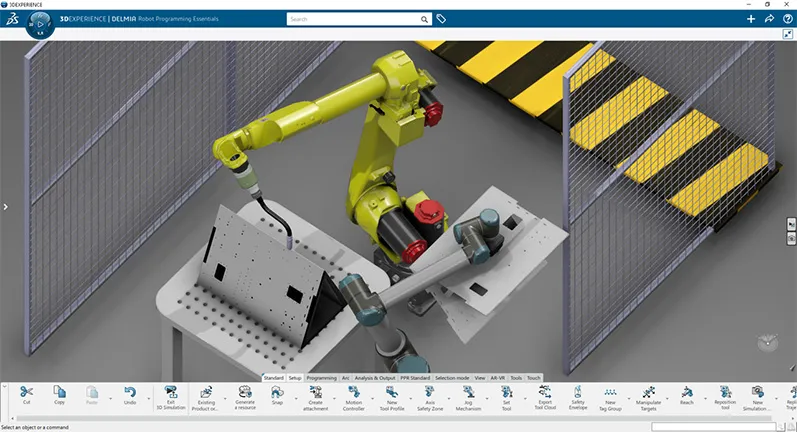
- Leçon 3A : Apprentissage d'un robot de manutention des matériaux
- Leçon 3B : Apprentissage d'un robot de soudage à l'arc
- Leçon 4 : Simuler et valider
- Leçon 5 : Programmation et étalonnage hors ligne