Inizia subito i tutorial!
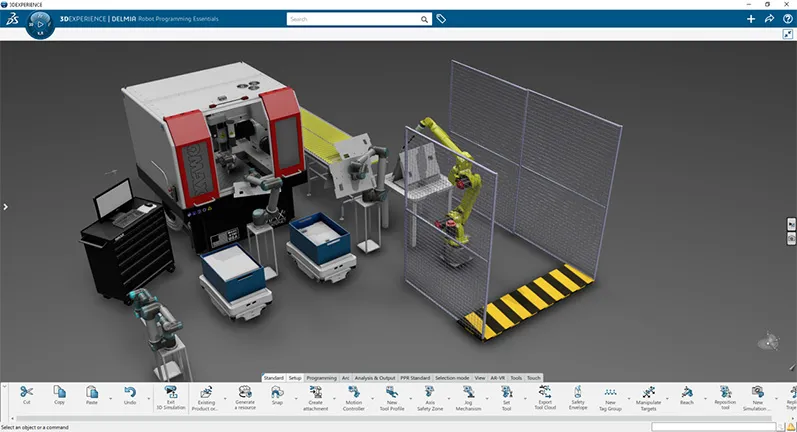
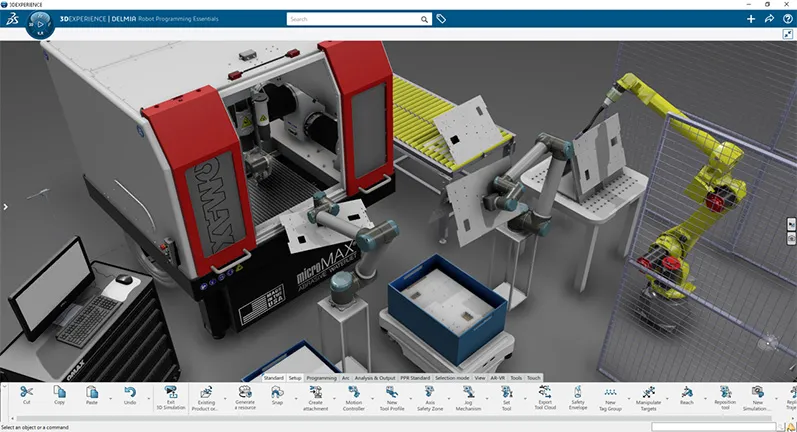
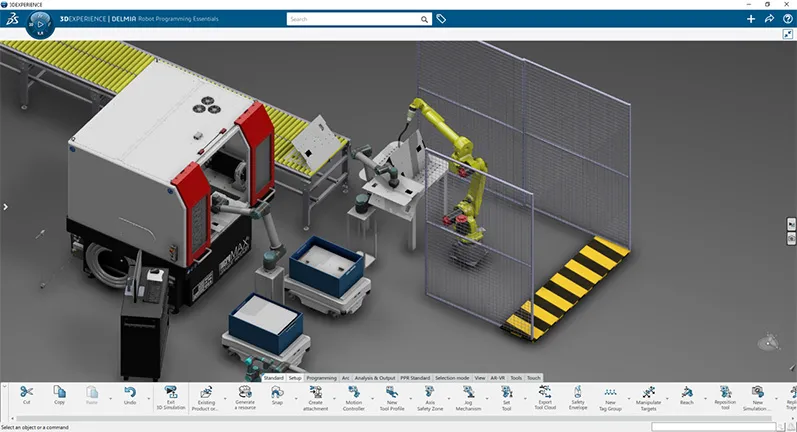
Unisciti a Tony Karew, SOLIDWORKS® Robotics Expert, e lasciati guidare nel corso delle lezioni dalla cella di lavoro al layout degli impianti, alla costruzione e alla cinematica dei dispositivi, all'apprendimento e alla simulazione robotici, alla convalida e, infine, alla programmazione offline.
Primo passaggio: Scarica la cartella zip con i file del modello per le esercitazioni.
- Lezione 1: Guida introduttiva a Robot Programmer
- Lezione 2: Costruzione di un meccanismo cinematico
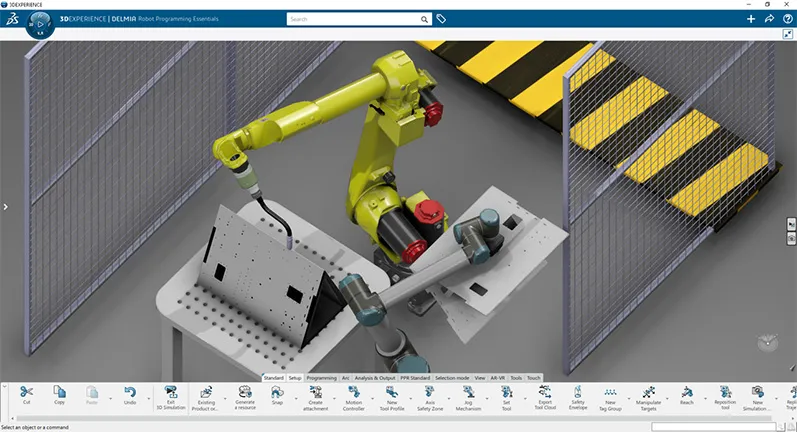
- Lezione 3A: Apprendimento robotico per la movimentazione dei materiali
- Lezione 3B: Apprendimento robotico per la saldatura ad arco
- Lezione 4: Simulazione e convalida
- Lezione 5: Programmazione e calibrazione offline