지금 바로 아래의 튜토리얼을 시작해 보십시오!
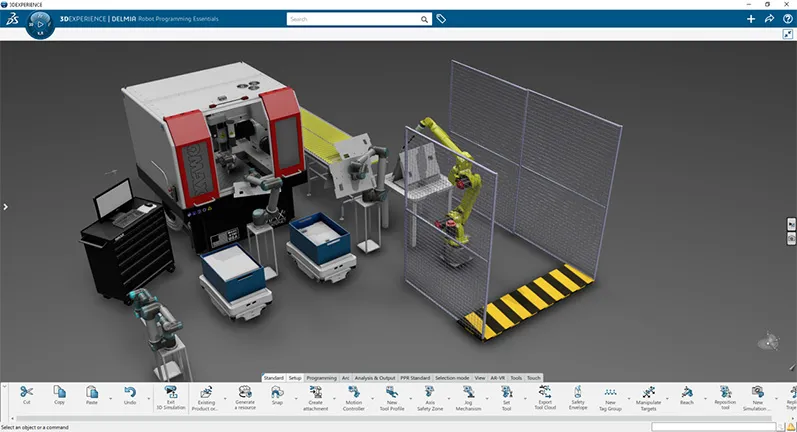
SOLIDWORKS® 로보틱스 전문가인 Tony Karew가 워크셀 및 플랜트 레이아웃부터 장치 구축 및 기구학, 로봇 교육 및 시뮬레이션, 검증 및 오프라인 프로그래밍까지 교육 과정을 안내해 드립니다.
첫 번째 단계: 튜토리얼용 모델 파일이 포함된 zip 폴더를 다운로드하십시오.
- 1장: Robot Programmer 시작하기
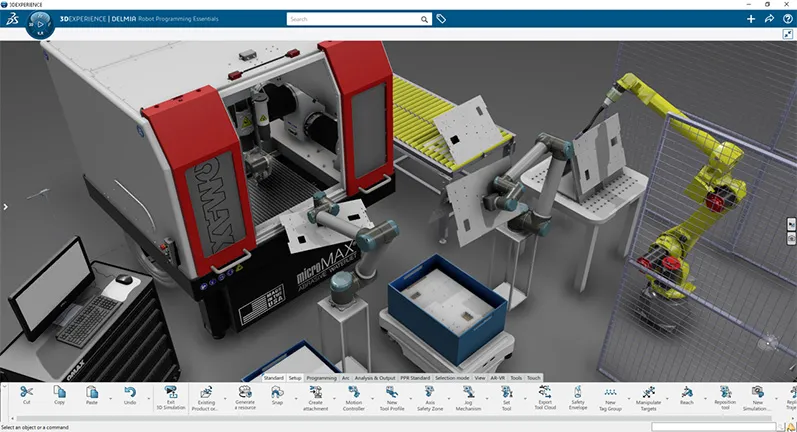
- 2장: 기구 메커니즘 만들기
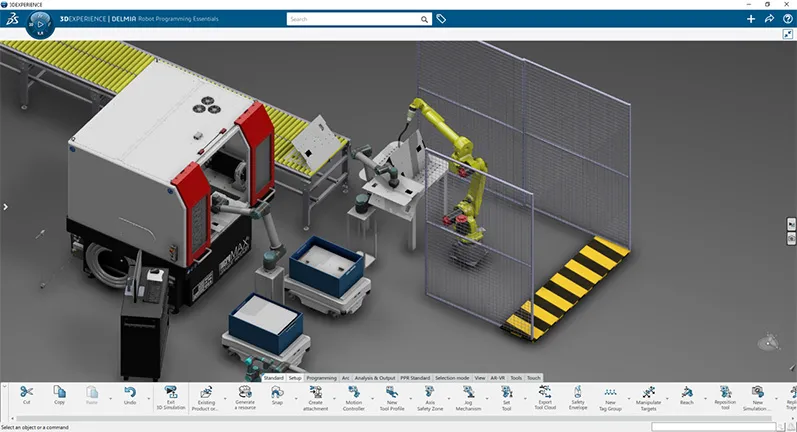
- 3A장: 자재 처리 로봇 교육하기
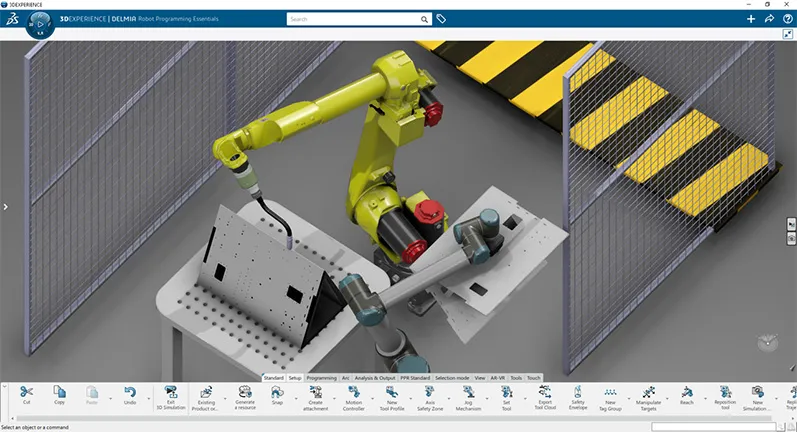
- 3B장: 원호 용접 로봇 교육하기
- 4장: 시뮬레이션 및 검증
- 5장: 프로그래밍 및 보정