Inicie os tutoriais abaixo hoje mesmo!
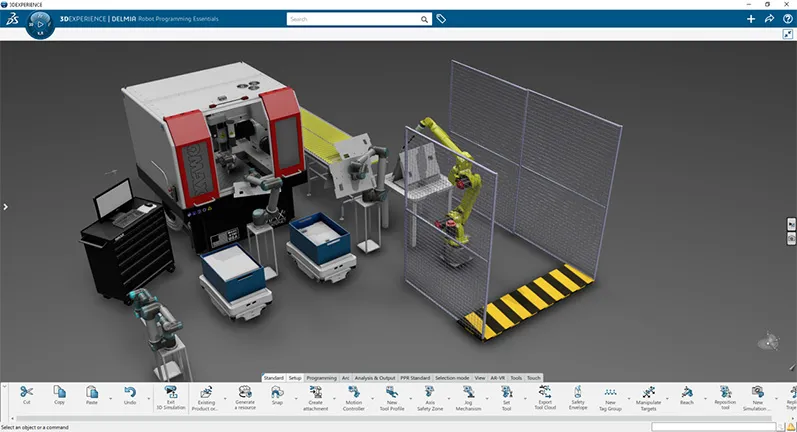
Junte-se a Tony Karew, especialista em robótica da SOLIDWORKS®, que guiará você pelas lições que o levarão desde o layout de células de trabalho e da planta, até a construção de dispositivos e cinemática, o ensino e simulação de robôs, e, por fim, a validação e a programação off-line.
Primeira etapa: Baixar a pasta zip com modelos de arquivos para os tutoriais.
- Lição 1: Introdução ao Robot Programmer
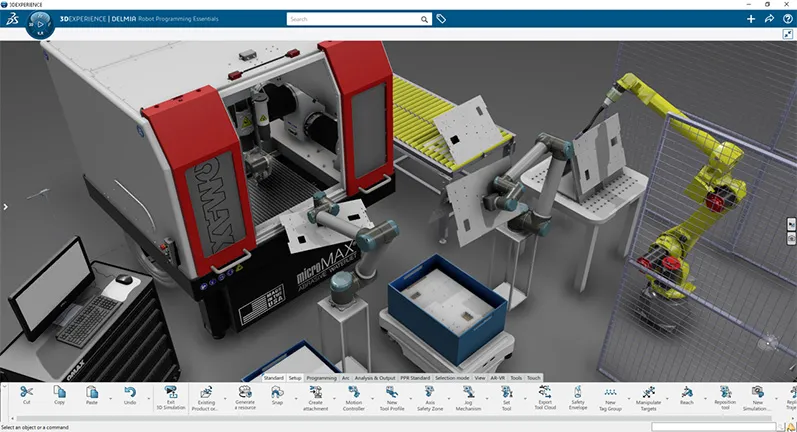
- Lição 2: Construção de um mecanismo cinemático
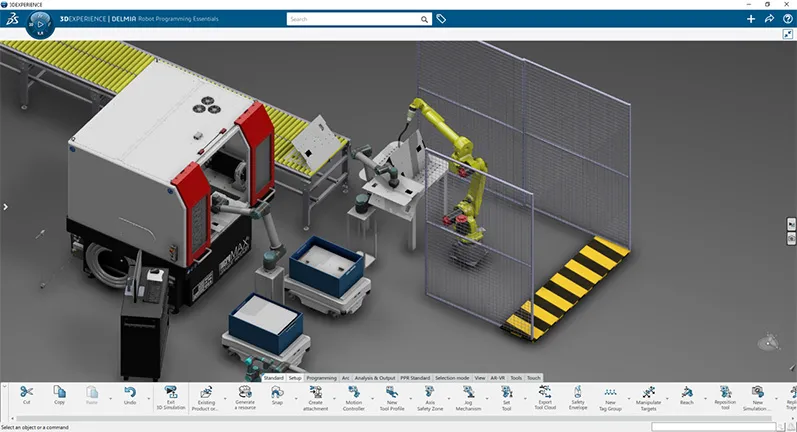
- Lição 3A: Ensinar um robô manipulador de materiais
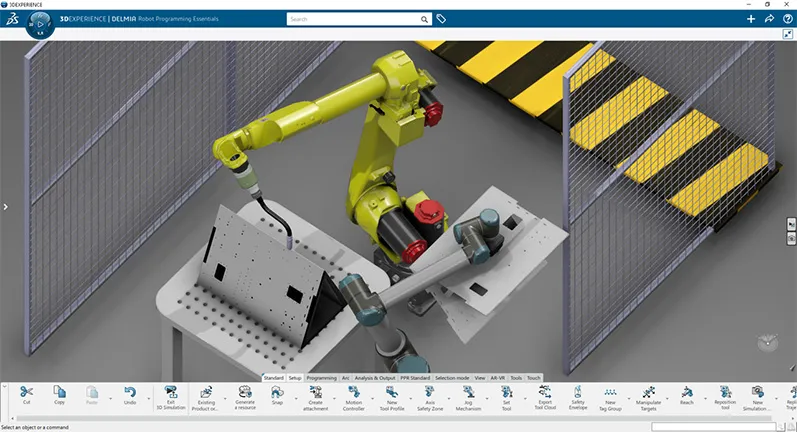
- Lição 3B: Ensinar um robô de soldagem a arco
- Lição 4: Simulação e validação
- Lição 5: Programação offline e calibração