Aşağıda yer alan eğitimlere hemen başlayın!
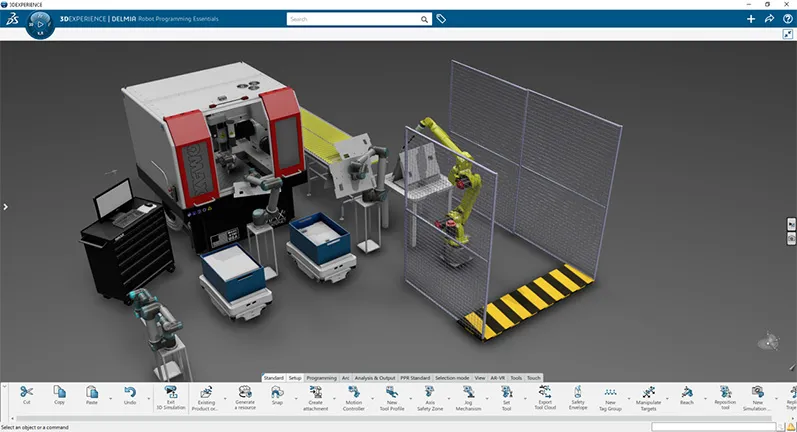
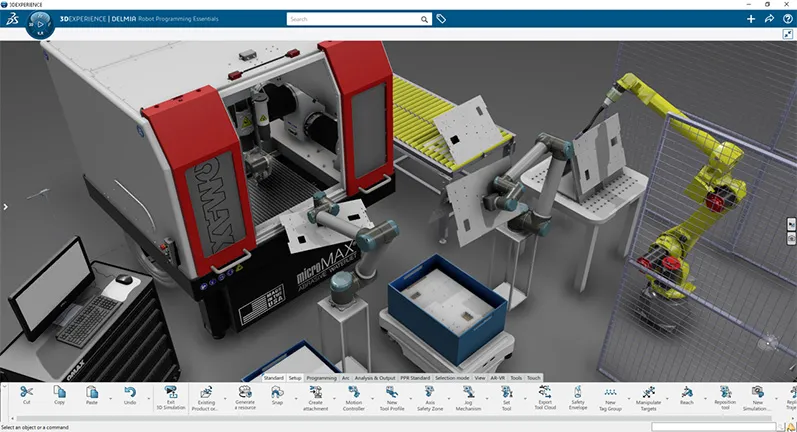
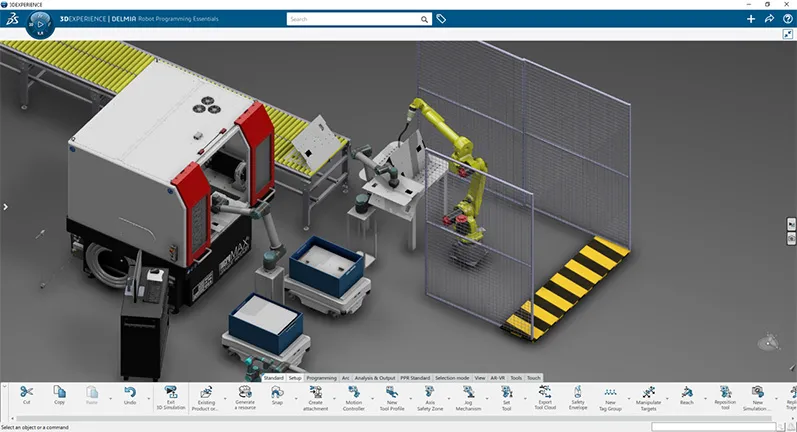
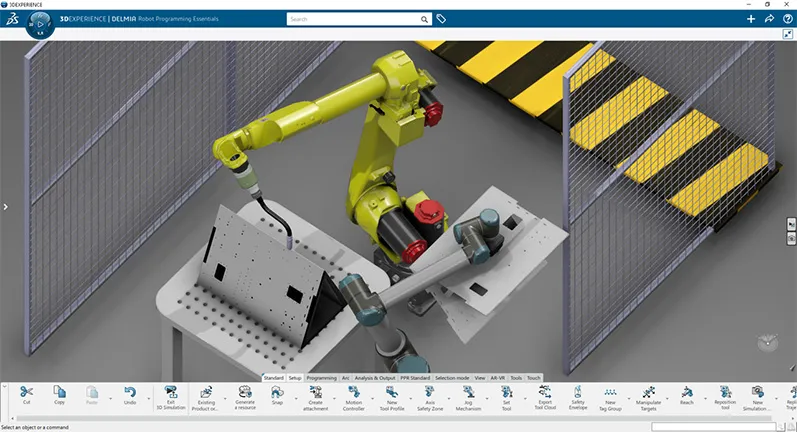
İş hücresi, fabrika yerleşimi, cihaz yapımı ve kinematiği, robot öğretimi ve simülasyonu, doğrulama ve çevrimdışı programlama gibi konularda sizi yönlendirecek derslerde SOLIDWORKS® Robot Teknolojileri Uzmanı Tony Karew'e katılın.
İlk adım: Eğitimler için model dosyalarını içeren zip dosyasını indirin
- Ders 1: Robot Programmer'a Giriş
- Ders 2: Kinematik Mekanizma Oluşturma
- Ders 3A: Malzeme Taşıma Robotu Öğretimi
- Ders 3B: Ark Kaynaklayıcı Robot Öğretimi
- Ders 4: Simülasyon ve Doğrulama
- Ders 5: Çevrimdışı Programlama ve Kalibrasyon