
Westwood Robotics社は信頼性の高いヒューマノイド システムを短時間で実現
先進的なロボット工学企業は、設計とシミュレーションをSOLIDWORKSで統合することで、コンセプトを早期に検証し、反復サイクルを短縮し、現実世界で運用できる拡張性に優れたヒューマノイド ロボットを実現しています。
課題
機械システム、センシング、制御、AIを物理的に実現可能な単一のプラットフォームに統合するヒューマノイド ロボットを設計し、バランスを維持して環境を解釈し、予測不能な状況でも確実に動作できるようにします。
解決策
スタートアップ企業向けSOLIDWORKSプログラムの一部として、設計とシミュレーションの両方に対応するSOLIDWORKS Designを統合し、設計意図と実際の動作間の緊密なフィードバック ループを確立します。
結果
- 開発の早い段階で設計上の制約を特定することで、反復サイクルを短縮。
- 事前のシミュレーション検証により、設計上の意思決定の信頼性が向上。
- 概念設計から物理的に実現可能・製造可能なシステムへの移行を達成。
- 現実世界での相互作用とダイナミック モーションに対応する拡張性に優れたヒューマノイド プラットフォームの開発をサポート。
ロボット工学の分野は、管理された環境から脱却し、配送ネットワークや製造現場、家庭など、日常生活の場面で効果を発揮するようになっています。この変化が加速するにつれて、期待は変化します。システムは機能するだけでは不十分です。信頼できる形で正確に機能するとともに、現実世界で実際に導入できるコストを維持しなければなりません。
今日開発されている最も複雑な製品の1つであるヒューマノイド ロボットは、この移行の中心にあります。こうしたロボットは、機械設計、電子機器、ソフトウェア、人工知能(AI)の緊密な連携を必要とします。単に機械を作るだけでなく、バランスを維持し、高度なセンシングで周囲の状況を解釈し、予測不能な環境でも一貫して動作できる機械を作ることが課題となります。つまり、機械システム、センシング、制御、AIを、物理的に実現可能な単一のプラットフォームに集約する必要があります。

この設計課題は、UCLAのRobotics&Mechanisms Laboratory(RoMeLa)の元コアメンバーによって2018年に設立されたWestwood Robotics社が掲げるミッションの中核です。
Westwood Robotics社は、ヒューマノイド ロボットと固有受容体アクチュエータ(位置、速度、力を継続的に測定し、そのデータを使用して即座に動きを調整するセンサー)の開発者として、フルサイズの汎用ヒューマノイドであるTHEMISや、STEAM(科学、技術、工学、芸術、数学) 教育と学術研究のためのオープン プラットフォーム ヒューマノイドである子供サイズのBRUCEなど、フラッグシップ プラットフォームを開発してきました。
クールな概念には失敗が付きもの
ヒューマノイド ロボットの開発は、設計の実現可能性の限界を押し広げます。理論的に優れた概念でも、製造可能性、コスト、構造の整合性などの実世界の制約により、実際には失敗することが多々あります。Westwood Robotics社の創設者兼CEOであるXiaoguang Zhang氏は、エンジニアが直面する現実について次のように述べています。「製造がほぼ不可能であったり、コストがかかりすぎるメカニズムや設計は、常に頭に浮かぶものです。製造可能なだけでなく、手頃なコストで製造可能な設計が求められます」
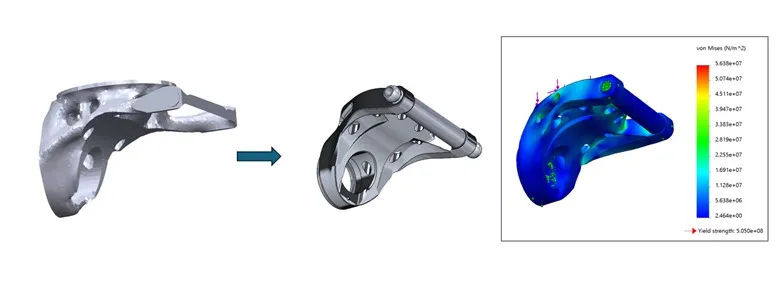
設計を構築できたとしても、検証がボトルネックになる場合があります。
「本当にクールな設計を考案したり、素晴らしいアイデアが思いついたとしても、十分な強度が出るように設計することは不可能なものもあります」とZhang氏は説明します。「変更が必要になり、行き詰まってしまうこともあります」バランス、移動、環境的な相互作用のすべてが同時に機能しなければならないヒューマノイド ロボットでは、この設計、テスト、失敗、改良という反復的なループがさらに困難になります。
関連リソース
SOLIDWORKSを利用すれば、まずはすべてを実現できます。他の作業に入る前に、まず(設計を)シミュレーションします。この検証なしでは、設計を実現する自信をまったく持てないからです。
設計とシミュレーションの統合
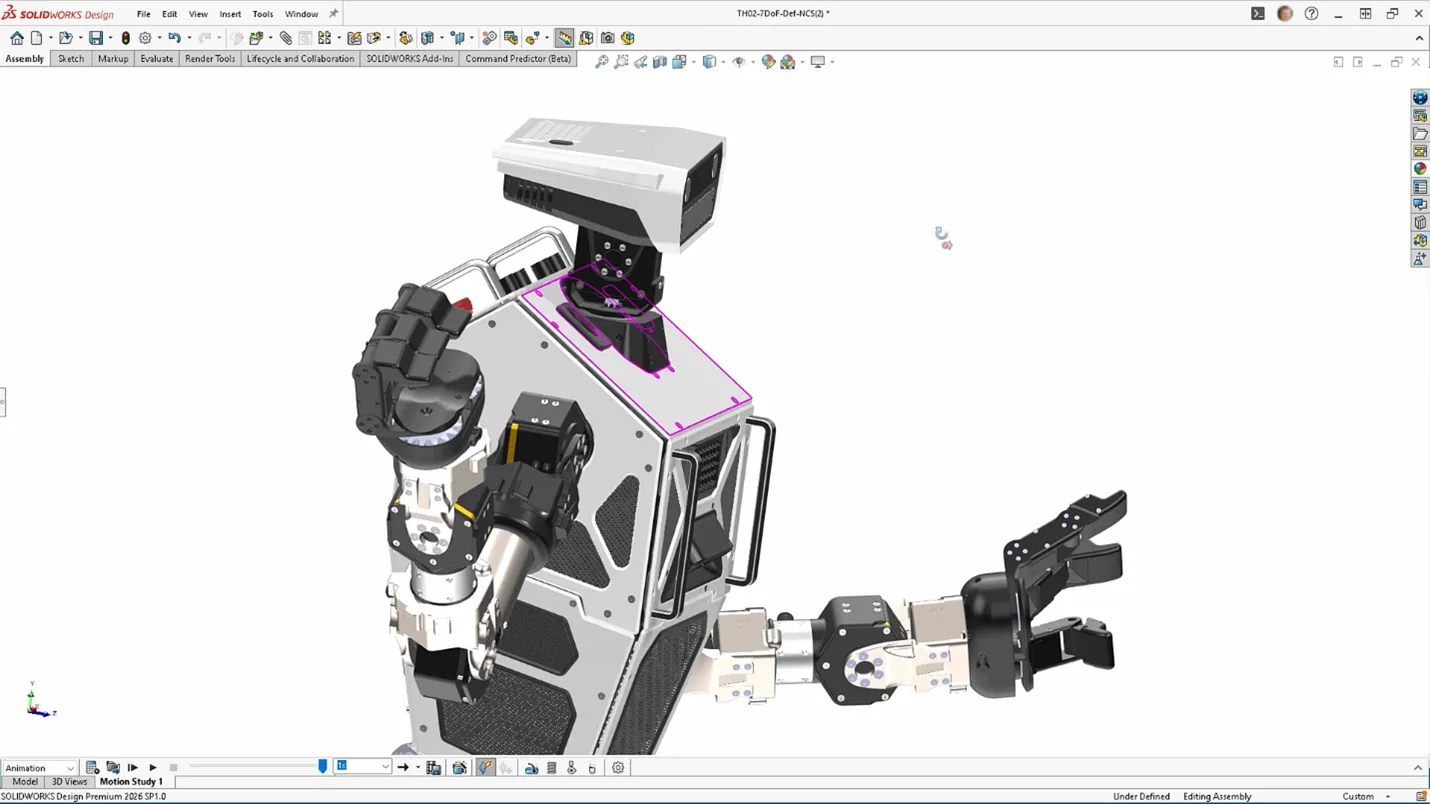
Westwood Robotics社は、スタートアップ企業向けSOLIDWORKSプログラムを活用し、概念設計と検証済みのエンジニアリングの現実の間のギャップを埋めました。シミュレーションは同社の標準ワークフローの一部となっています。「SOLIDWORKSを利用すれば、まずはすべてを実現できます。他の作業に入る前に、まず(設計を)シミュレーションします。この検証なしでは、設計を実現する自信をまったく持てないからです」
設計とシミュレーションの緊密な統合は、ロボット工学が計画、制御、物理的な実現可能性を統合するエンドツーエンドのシステムに移行していることを反映しています。SOLIDWORKS Designは、製品開発レベルでも同様の考え方を実践できます。つまり、設計意図と検証済みの性能の間の継続的なループを確立できるのです。
Westwood Robotics社は、SOLIDWORKS Designにおける設計とシミュレーション間のスムーズな連携/移行を高く評価しています。「頭の中で想像したものを実際の部品として形にする設計能力は、常に重要です」とZhang氏は熱く語っています。
拡張性に優れたプラットフォーム
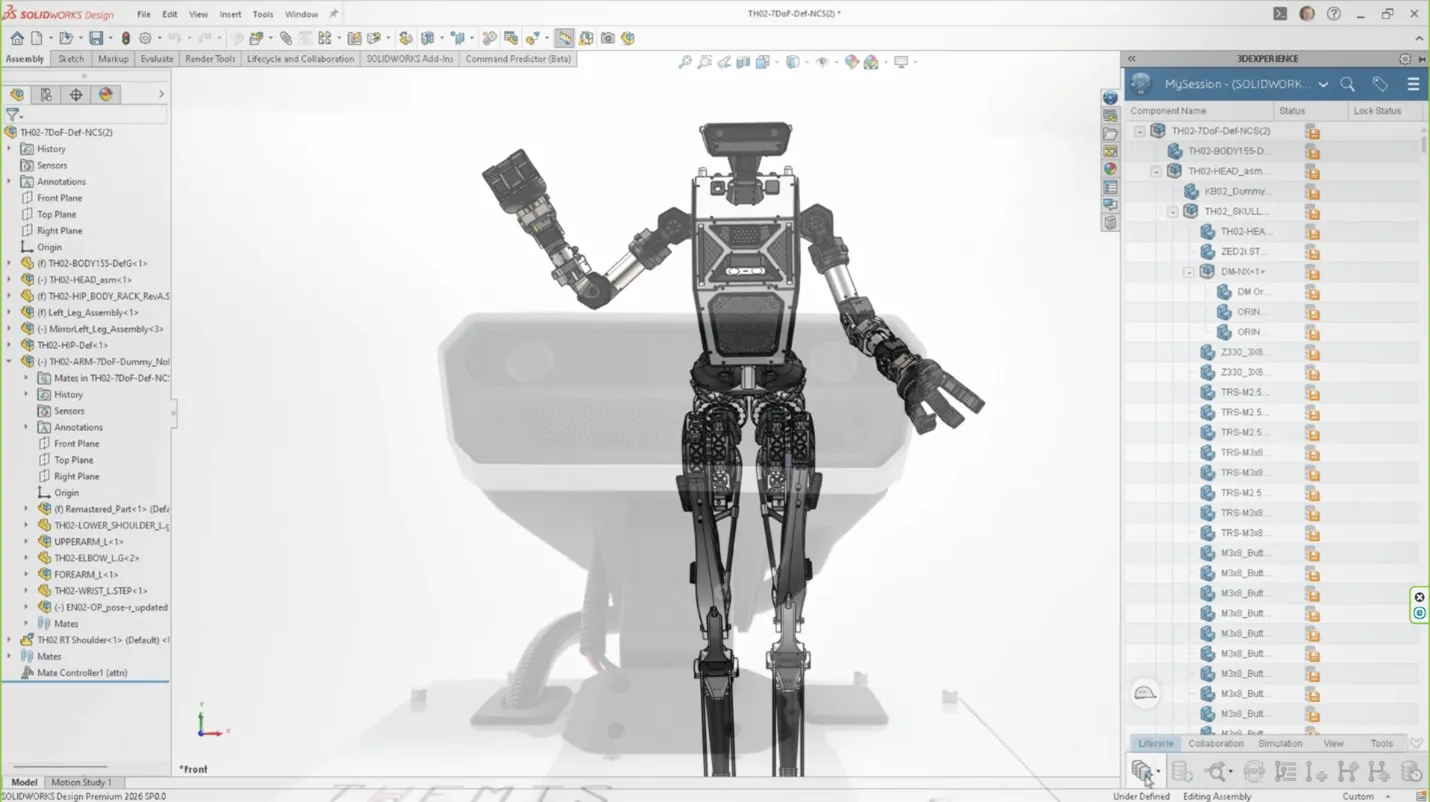
Westwood Robotics社は、SOLIDWORKS Designを活用し、THEMISやBRUCEなどの高度なヒューマノイド プラットフォームを開発しました。これらは、実際の相互作用とダイナミック モーションに対応するように設計されています。「Westwood Robotics社のTHEMISヒューマノイドは、環境との安全な相互作用とともに、歩行、ランニング、その他の操作など、ダイナミック モーションを目的として設計されています。
高頻度慣性センシングなどのサポート技術は、ロボットの安定性と制御に必要なリアルタイムのフィードバックを提供します。その結果、機能的な試作品だけでなく、研究や産業向けの拡張性に優れたプラットフォームを実現できます。Westwood Robotics社のロボットは、高度な移動性、操作性、適応性を発揮しています。これらはすべて、管理された環境を超えてヒューマノイド ロボットを展開するための重要な要件となります。
イノベーションは重要
SOLIDWORKS Designは単なる設計ツールではなく、Westwood Robotics社のイノベーションを実現する中核的なツールです。Zhang氏は次のようにまとめています。「私はSOLIDWORKSについて、ロボットを生成するための最も重要なツールの1つだと考えています。目が覚めて、(SOLIDWORKSが)無くなっていることに気づいたら、パニックになるでしょうね」
Westwood Robotics社は、設計とシミュレーションを緊密に統合することで、反復サイクルを短縮し、行き止まりになる概念を早期に回避して、あらゆる設計上の意思決定における信頼性を高めています。物理的な実現可能性とリアルタイムの制御能力が切り離せないヒューマノイド ロボット分野では、この2つの要素を両立できるかどうかが、単なるアイデアで終わるか、実際に動作するヒューマノイド システムを実現できるかを左右します。

製品:
- SOLIDWORKS Professional
- SOLIDWORKS Simulation Professional
SOLIDWORKS Extended Portfolioの詳細を見る
SOLIDWORKSソリューションについてご不明な点はありますか?
お客様とお客様のチームは、SOLIDWORKSソリューションによって、短期間で新しいアイデアを優れた製品に変えることができます。